Tempo di risposta del controllo
Quando si controllano asset (VE, batterie), il SmartgridOne Controller invia un comando al dispositivo, che poi necessita di tempo per elaborare questo comando e regolare il proprio stato di conseguenza. Questo è noto come tempo di risposta del controllo.
Il tempo necessario per questo, e il tempo che impiega il SmartgridOne Controller per inviare un nuovo comando, dipendono dai seguenti fattori:
- Il tipo di dispositivo (ad esempio, batteria, caricabatterie VE, pompa di calore)
- Il settling check
- Limitazioni sul bus RS485
- L'intervallo del scheduler
Quando il tuo SmartgridOne Controller è attivo nei servizi ancillari, un tempo di risposta rapido è cruciale.
In questa pagina, spiegheremo come questi fattori influenzano il tempo di risposta del controllo e come è possibile ottimizzarlo per il tuo caso d’uso specifico.
Suggerimento
Punti chiave:
- Non usare Modbus-RTU (RS485) quando sono collegati più dispositivi al bus RS485. Usa invece Modbus-TCP.
- Disabilita le impostazioni di ramp-up e ramp-down sui dispositivi che le supportano, come batterie e inverter, per consentire tempi di risposta più rapidi.
- Disabilita il settling check, se ne comprendi le implicazioni.
- Imposta l'intervallo del scheduler a 1 secondo per una più veloce elaborazione dei comandi.
Per la spiegazione completa di questi fattori, continua a leggere qui sotto.
Il tipo di dispositivo
Diversi tipi di dispositivi hanno tempi di risposta intrinsecamente diversi a causa delle loro caratteristiche tecniche e dei protocolli di comunicazione:
Batterie e/o inverter solari (inclusi inverter ibridi)
- Tipicamente tempi di risposta rapidi (1-5 secondi)
- Il tempo di risposta dipende principalmente dai controlli interni dell’inverter
- Potrebbero avere tassi di rampa integrati per le transizioni di potenza
Caricabatterie VE
- Tempo di risposta medio (5-15 secondi)
- La risposta dipende da:
- Protocollo di comunicazione (OCPP, Modbus, proprietario)
- Capacità di ricarica del veicolo
- Stato attuale di ricarica
- Devono rispettare i requisiti minimi di corrente di carica
Pompe di calore
- Tempi di risposta più lunghi (30-180 secondi)
- Regolazioni graduali della potenza per proteggere il compressore
- Il tempo di risposta è influenzato da:
- Modalità di funzionamento (riscaldamento/raffreddamento)
- Condizioni temperature correnti
- Meccanismi di protezione interni
Relè e interruttori
- Tempi di risposta rapidi (1-5 secondi)
- Tipicamente usati per controlli semplici on/off
Suggerimento
Per un controllo ottimale, considera il dispositivo con la risposta più lenta quando imposti i parametri di controllo. Questo garantisce un funzionamento stabile su tutti i dispositivi connessi.
Il 'Settling Check'
Quando si lavora con marchi, protocolli e modelli di dispositivi multipli, la pazienza diventa essenziale. Sebbene dispositivi come batterie, inverter e caricabatterie VE rispondano tipicamente rapidamente ai comandi, necessitano di tempo per aggiornare le loro misurazioni e inviarle nuovamente al Controller.
Due fattori chiave influenzano i tempi di risposta:
- I contatori di energia possono inviare dati a frequenze più basse, quindi non riflettono immediatamente le azioni più recenti del dispositivo
- I dispositivi spesso necessitano di tempo per aumentare gradualmente la potenza e stabilizzarsi per raggiungere gli stati target
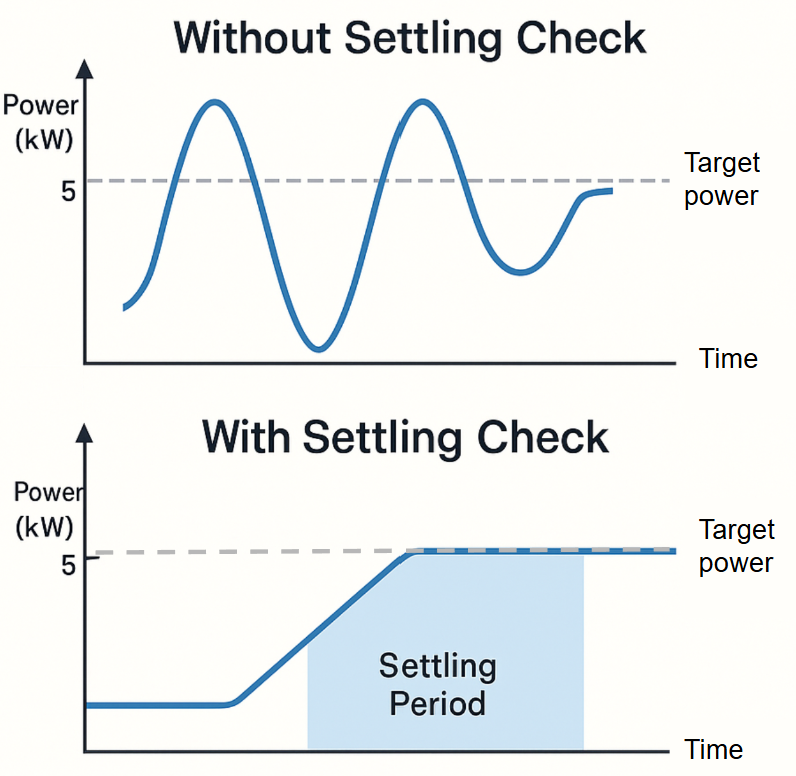
Qui entrano in gioco i settling check. Un settling check è un periodo di attesa che garantisce che i dispositivi abbiano raggiunto completamente gli stati comandati prima che vengano prese nuove decisioni. Pensalo come lasciare cadere la polvere dopo un cambiamento. Senza questo meccanismo, il nostro sistema di controllo potrebbe reagire a stati temporanei durante il periodo di transizione. Questo porterebbe a correzioni inutili - simile a cercare di bilanciarsi su una piattaforma instabile correggendo continuamente, peggiorando la situazione.
La nostra implementazione monitora tre aspetti cruciali: Primo, verifica che le misurazioni siano recenti e affidabili, assicurando che non si reagisca a informazioni obsolete. Secondo, traccia come i flussi di potenza cambiano nel tempo, confermando che i dispositivi rispondano come previsto. Infine, rispetta i ritardi intrinseci nelle risposte dei dispositivi, dando agli apparecchi il tempo necessario per raggiungere un funzionamento stabile.
Considera un sito con due dispositivi: un sistema batteria moderno e una pompa di calore più vecchia. Quando inviamo un comando per ridurre il consumo di potenza di 5kW:
| Tempo | Batteria | Pompa di calore | Risposta di sistema |
|---|---|---|---|
| 0:00 | 0kW | 5kW | Comando inviato: ridurre di 5kW |
| 0:01 | -2kW | 5kW | La batteria risponde rapidamente |
| 0:03 | -2kW | 3kW | La pompa di calore inizia a rispondere |
| 0:05 | -2kW | 3kW | Attesa per stabilità |
| 0:07 | -2kW | 3kW | Il sistema conferma lo stato stabile |
La batteria risponde quasi immediatamente, ma il vecchio sistema di controllo della pompa di calore impiega più tempo per regolare e segnalare il nuovo stato. Senza i settling check, potremmo interpretare erroneamente questo ritardo come un mancato riscontro e inviare comandi aggiuntivi, destabilizzando potenzialmente il sistema. Invece, il nostro controller aspetta pazientemente che tutti i dispositivi segnalino stati stabili prima di prendere nuove decisioni.
La timeline per questo flusso esatto appare così:
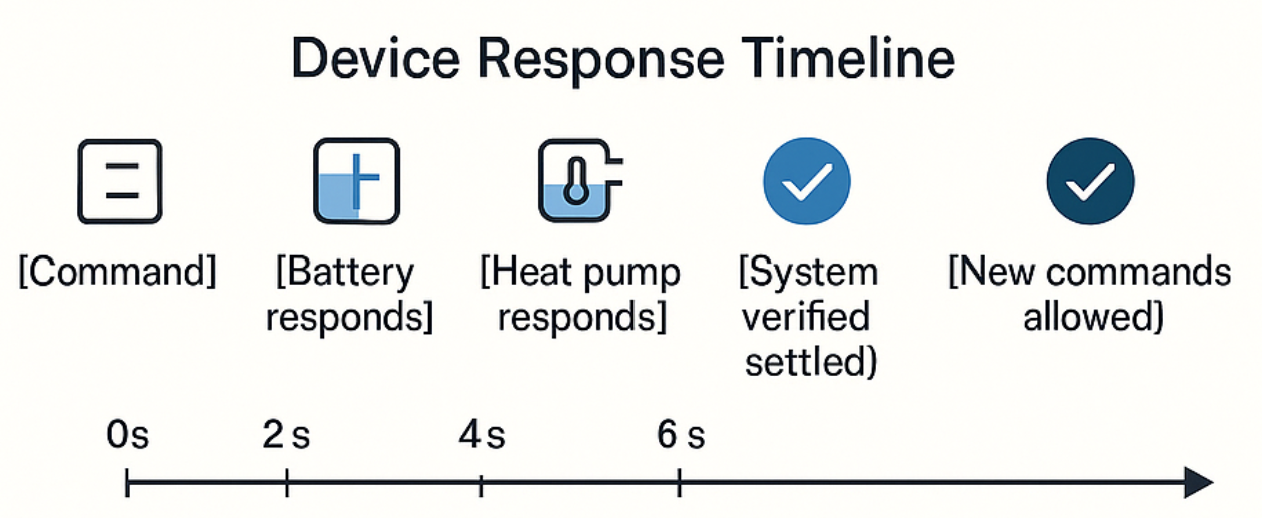
Questo approccio misurato può sembrare eccessivamente prudente, ma nel mondo dei sistemi di potenza, la stabilità e la longevità dell’apparecchiatura sono molto più importanti rispetto al fascino delle regolazioni rapide.
Disabilitare il settling check
Avviso
- La disabilitazione non è raccomandata e dovrebbe essere fatta solo in casi eccezionali. Altrimenti si rischia di destabilizzare il sistema e causare oscillazioni.
- Procedi con cautela e solo se comprendi pienamente le implicazioni e preferisci la velocità alla stabilità.
Il settling check può essere disabilitato nell’app SmartgridOne Controller sotto le impostazioni avanzate. Questo permetterà al controller di inviare comandi senza attendere che i dispositivi si stabilizzino, potenzialmente accelerando il tempo di risposta.
Click here to see the instructions
- Apri la pagina delle impostazioni:
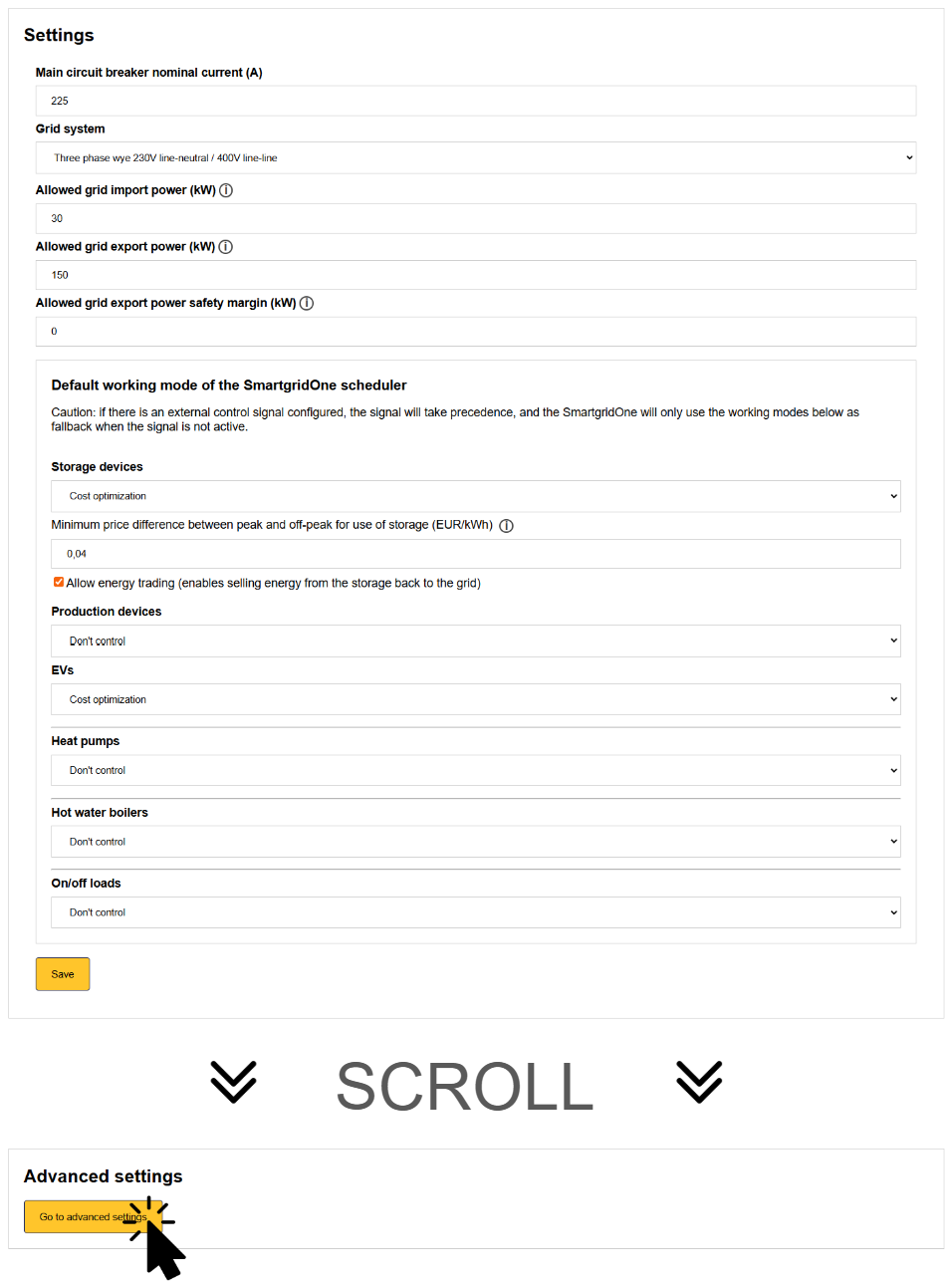
- Imposta "Enable device settling check" su
False:
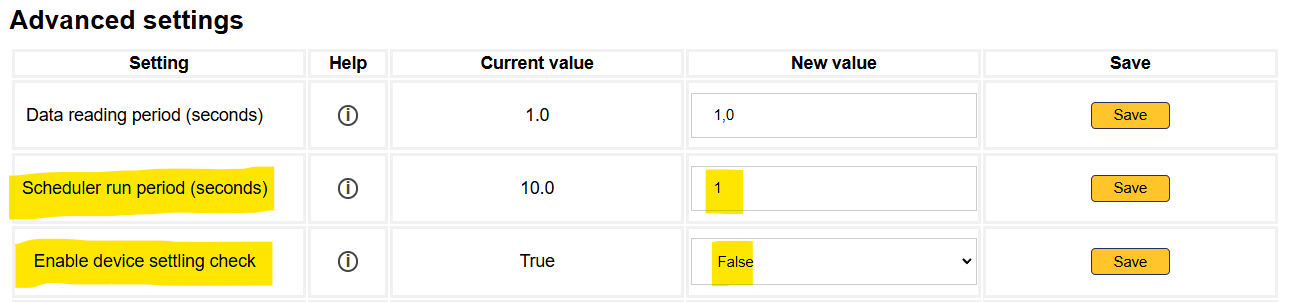
- Clicca su 'Salva' a destra della riga.
Limitazioni sul bus RS485
Quando più dispositivi sono collegati al bus RS485, il tempo di risposta del controllo può essere influenzato a causa della limitazione intrinseca della comunicazione RS485 - solo un dispositivo può comunicare alla volta.
Poiché i dispositivi si alternano nella comunicazione sul bus, ogni dispositivo aggiuntivo aumenta il tempo complessivo del ciclo di comunicazione. Questo può portare a tempi di risposta più lenti per tutti i dispositivi connessi.
Per prestazioni ottimali:
- Limita il numero di dispositivi a 5 o meno per ogni bus RS485
- Usa accessori di espansione RS485 quando connetti più dispositivi
Suggerimento
Per informazioni dettagliate sul cablaggio RS485 e le migliori pratiche, consulta la guida Wiring Best Practices.
Intervallo del scheduler
L’intervallo del scheduler determina con quale frequenza il SmartgridOne Controller controlla la presenza di nuovi comandi e li invia ai dispositivi. Un intervallo più breve permette tempi di risposta più rapidi, mentre uno più lungo può causare ritardi nell’esecuzione dei comandi.
Verifica che l’intervallo del scheduler sia impostato su un valore ragionevole per il tuo caso d’uso. L’intervallo predefinito è di 1 secondo, ma puoi regolarlo nelle impostazioni avanzate:
Click here to see the instructions
- Apri la pagina delle impostazioni:
- Imposta "Enable device settling check" su
False:
- Clicca su 'Salva' a destra della riga.